Po wylataniu kilkudziesięciu pakietów modelem GEPRC AX-215 stwierdziłem, że przydałby się dron o lepszych osiągach. Jako podstawę wybrałem klona ramy firmy
Lumenier QAV-R. Następnie wybrałem silniki (
DV2205/2600kV). Poniżej przedstawiona jest rama z zamontowanymi silnikami do przymiarki.
Następnym etapem był wybór regulatorów (ESC). Postanowiłem wykorzystać układy firmy RacerStar RS30A BlHeli_S z obsługą protokołów komunikacyjnych Dshot150/300 i możliwością zasilania pakietami od 2s do 4s. Pozostała kwestia wyboru odpowiedniego FC. W związku z tym, że regulatory obsługują Dshot trzeba było wybrać FC zbudowany w oparciu o mikrokontroler co najmniej STM32F3. Wszystkie FC zbudowane z użyciem mikrokontrolerów STM32F1 nie obsługują protokołu Dshot, łatwo to sprawdzić wpisując w terminalu CLI konfiguratora Cleanflight/Betaflight "
get pwm”. Dodatkowo wersja oprogramowania Betaflight z numerem 3.2 będzie ostatnią, która wspiera układy zbudowane z użyciem STM32F1 (
Betaflight Wiki).
Mój pierwszy wybór padł na FC SPRacing EVO 3. Jest to FC zbudowany z wykorzystaniem mikrokontrolera STM32F303 posiada akcelerometr/żyroskop/magnetometr MPU9250 na magistrali SPI, barometr BMP280, złącze kart SD, trzy porty szeregowe oraz złącze USB do komunikacji z komputerem. Na zdjęciu poniżej FC jest podłączony do PDB firmy Matek oraz ma zainstalowany układ OSD (Mikro MinimOSD).
Bardzo fajnym sposobem montażu Mikro MinimOSD jest bezpośrednie wpięcie w złącze UART3, na którym mamy dostępne GND, +5V, TX, RX. Co widać na poniższym zdjęciu.
Widok modelu z zamontowanymi silnikami, ESC, PDB, FC.
Model gotowy do pierwszych testów.
Opisana konfiguracja sprawowała się całkiem dobrze ale trzeba było dokonać pewnych modyfikacji. W związku z tym, że FC komunikuje się z ESC przy użyciu protokołu Dshot300 należało przemapować wyjście FC 4 na 5 tak aby wyeliminować konflikt DMA w zasobach mikrokontrolera.
W tym celu należało w CLI wprowadzić następujące zmiany:
resource motor 5 none
resource motor 4 A06
save
Oraz podłączyć ESC nr 4 (silnik nr 4) do wyjścia nr 5 FC. Po tym zabiegu wszystkie silniki pracują idealnie i korzystają z protokołu Dshot300.
Po pierwszych próbach uruchomienia silników moja pierwsza myśl jak one płynnie chodzą. W innym Quadzie używam OneShot125 i w porównaniu do zwykłego PWM’a to był duży skok. W tym przypadku jest jeszcze większy.
Aktualnie jest możliwe ustawianie wszystkich parametrów FC przez OSD oraz przez s.port. Co to oznacza. Korzystając z OSD można praktycznie konfigurować cały FC. Wykorzystując tylko aparaturę mogę ustawiać PID’y (używamy do tego skryptu w LUA uruchomionego w aparaturze). Całość daje niesłychaną swobodę konfiguracji w terenie. Nie potrzeba zabierać ze sobą komputera.
W związku z tym, że zakupiłem nowy nadajnik video vTX TBS Unify HV Race w celu przetestowania jego możliwości.
W szczególności chodziło o jakość przesyłanego sygnału wideo oraz wykorzystania możliwości protokołu Smart Audio. Jak się okazało wszystkie interfejsy szeregowe (UART) we FC SP Racing EVO 3 zostały już wykorzystane (UART1 - telemetria, UART2 - SBUS, UART3 - Mikro MinimOSD). Jak widać brakuje jeszcze jednego UART'a do połączenia z vTX korzystając ze Smart Audio. Zaszła więc potrzeba poszukania innego FC. Mój wybór tym razem padł na DYS F4PRO. Poniżej przedstawiony jest FC zamontowany już w modelu z podłączonymi ESC, kamerą, odbiornikiem i nadajnikiem vTX.
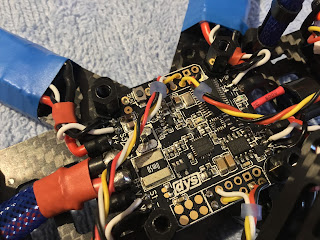
Jest to kontroler, który ma w sobie PDB oraz OSD czyli zwolni się jeden UART dzięki czemu będziemy mogli podłączyć nasz nadajnik vTX korzystając ze Smart Audio. Co nam to daje. Oprócz opisanej już konfiguracji FC możemy również ustawić parametry nadajnika wideo (vTX). Możemy to zrobić przez OSD lub wykorzystać tylko aparaturę. Zmiana częstotliwości vTX z poziomu aparatury jest świetnym rozwiązaniem, nigdy więcej przycisków i mikroprzełączników. Sposób zamontowania elektroniki w modelu przedstawiony został na zdjęciu. Widać, że odbiornik FrSky X4RSB został zamocowany na dodatkowej płytce montowanej nad FC. W odbiorniku usunięto złącza pinowe i przylutowano przewody bezpośrednio do płytki. Pozwoliło to zmniejszyć rozmiar odbiornika. Dodatkowo z odbiornika poprowadzono nieodwrócony sygnał S.Port potrzebny do telemetrii. Jak wiadomo FC z mikrokontrolerami STM32F4 najczęściej nie mają wbudowanego układu inwertera. W przypadku DYS F4PRO inwerter znajduje się tylko na lini SBUS więc modyfikacja S.Port jest konieczna w celu uzyskania odczytów telemetrii na aparaturze.

Widok odbiornika zamontowanego nad FC przedstawiony jest na zdjęciu poniżej.
Rozwiązanie takie według mnie wprowadza porządek w cały układ elektroniki sterującej. Pozostała tylko kwestia mądrego zamocowania nadajnika vTX. W tym przypadku chcę przygotować odpowiedni wydruk 3D. Sposób montażu nadajnika nad FC dobrze widać na zdjęciu przedstawionym niżej.
Model w całej okazałości prezentuje się tak.
Brakuje w nim tylko elementu do montażu nadajnika vTX oraz zabezpieczenia anten odbiorczych X4RSB. Masa modelu bez baterii wynosi 344g co uważam za dobry wynik. Jak pojawią się dodatkowe szczegóły związane z tym modelem to uzupełnię informacje.
Zainstalowane w modelu:
FC: DYS F4PRO
ESC:RacerStar 30A (Dshot300)
Silniki: DX2205
RX: x4rsb (sbus i s.port)
vTX: TBS Unify HV Race (Smart Audio)
Kamera FPV: RunCam Swift 2
Podsumowując. Dlaczego wymieniłem nadajnik wideo na TBS Unify HV Race. Między innymi dla funkcji opisanych wyżej czyli łatwości zarządzania nadajnikiem wideo. Dodatkowo nadajniki TBS Unify są jednymi z najczęściej obok ImmersionRC Tramp polecanych nadajników sygnału wideo. Chcąc brać udział w zawodach najczęściej jednym z wymogów organizatorów jest posiadanie któregoś z wymienionych nadajników.











Brak komentarzy:
Prześlij komentarz